[affine_space]
The affine space of a finite-dimensional vector space is origin selection + coordinate/vector space
where and are set-theoretically isomorphic, both isomorphic to
Using addition to represent the position after traveling unit time along vector starting from origin :
Using subtraction to represent the vector between two points : corresponds to the unique such that
The affine space allows changing the origin. When origin , coordinates
Affine subspace is equivalent to origin + vector subspace
Example Parameterization of a 2D subspace in 3D :
[affine_combination]
Affine combination of points
is a well-defined affine point, meaning the coordinate definition does not depend on the choice of origin. Let the coordinates of be , then the coordinates of point are . If we change the origin , then the coordinates of point will also be translated by along with the origin
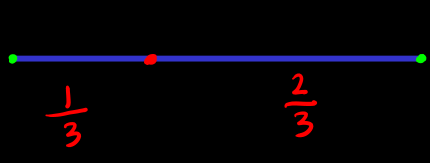
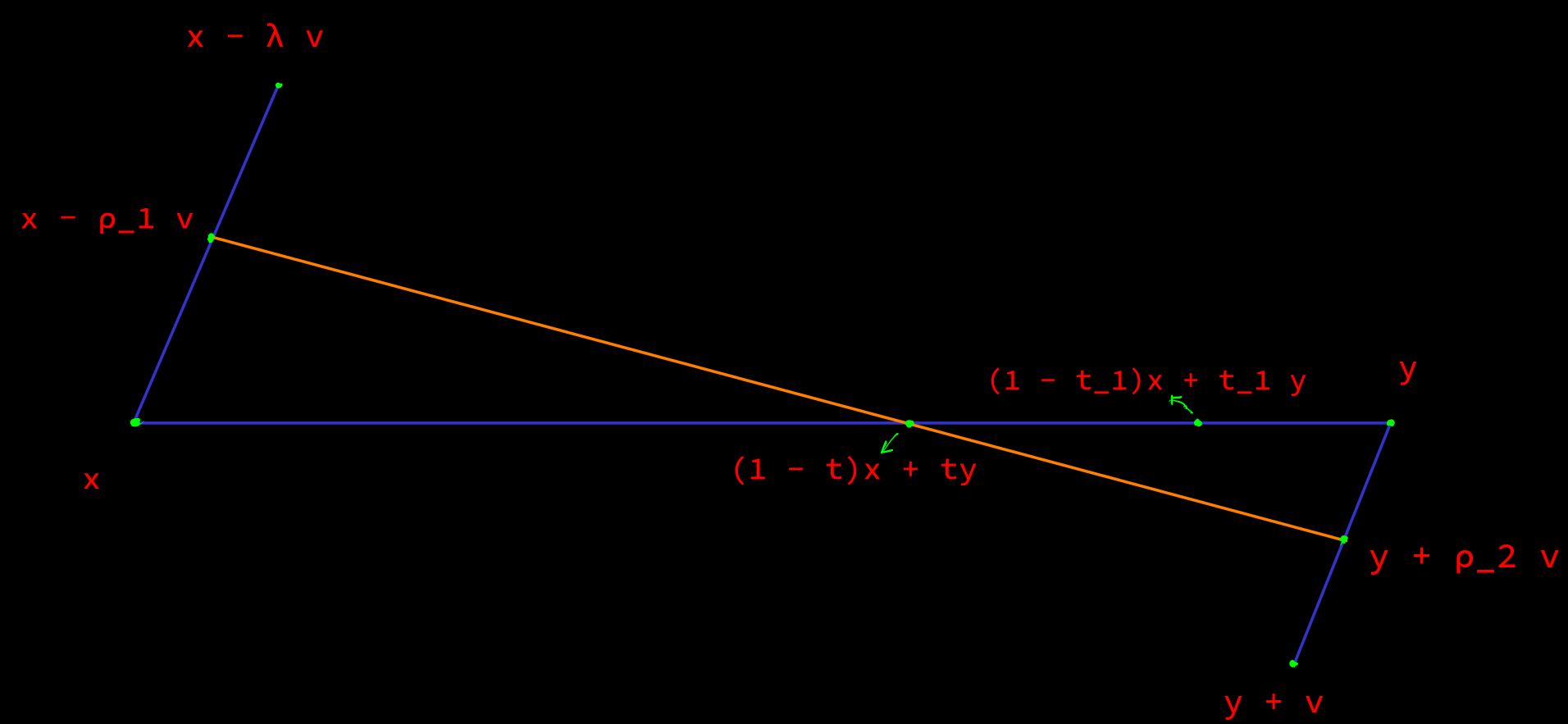
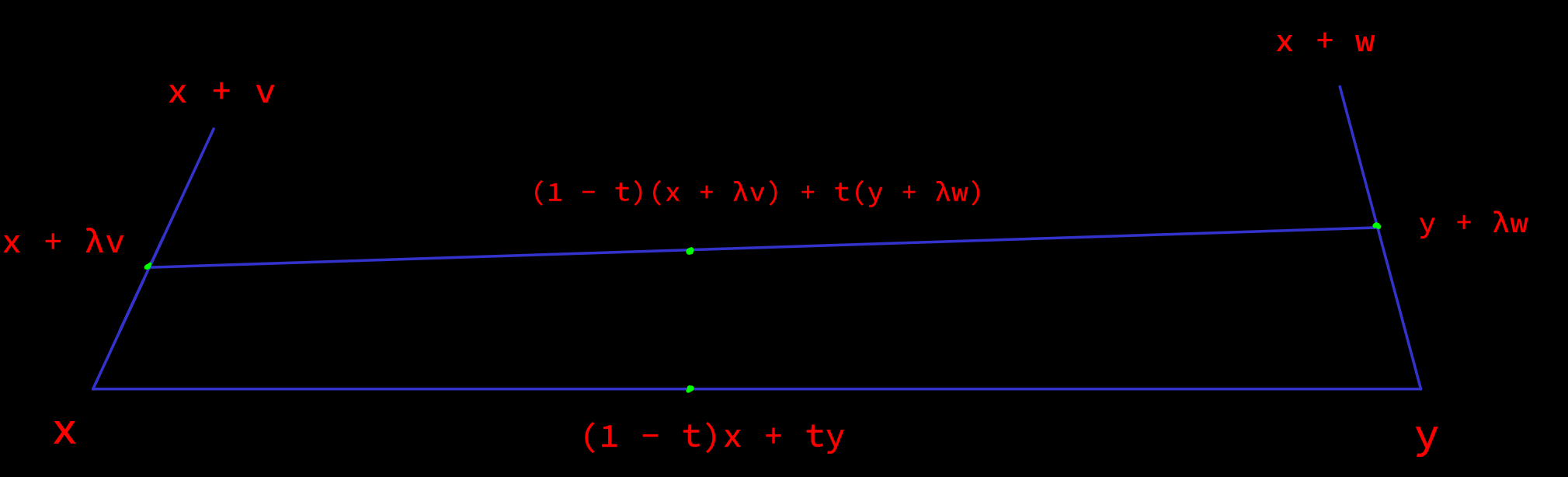
Intuition for affine combination: the simplest example is proportional points on a line determined by two points
Nested affine combinations can be used
For example, the linear combination of points with the additional restriction forms a triangle
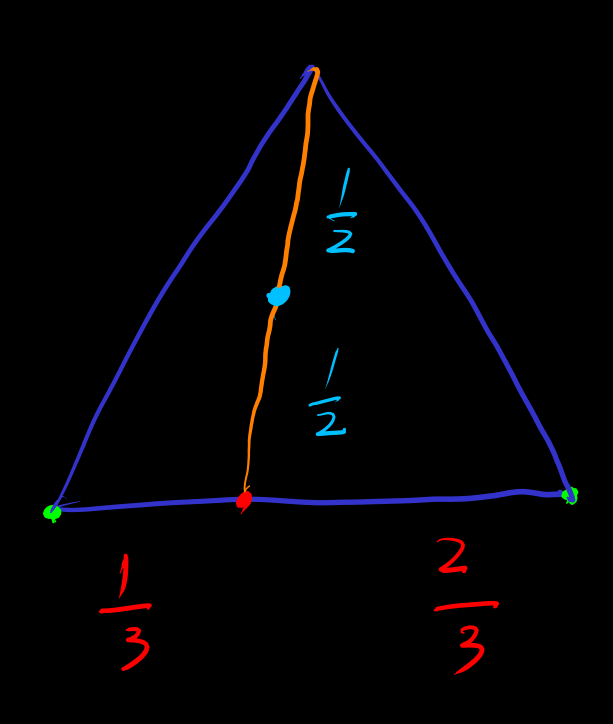
It can be considered as , where
- is the affine combination of , representing the side of the triangle formed by ,
The nesting is denoted as , and this operation should be associative
[affine_coordinate] The in the point can be considered as a kind of coordinate based on the points . Called affine coordinates. alias barycentric coordinates [barycentric_coordinate]
Example [center_of_affine_point_set] Midpoint/centroid of affine combination has affine coordinates
[affine_independent]
Affine independent := For each , vertex is not in the affine combination of , i.e.
This means each point in the affine combination is not redundant. Intuitively, is not in the affine subspace spanned by
Affine dependent := There exists , vertex is in the affine combination of , i.e.
This means there exists a point among the affine combination points that is redundant. Intuitively, is in the affine subspace spanned by
Affine independent <==> After selecting one point e.g. as origin, are linearly independent
If vertices are affine independent, any affine combination point has a unique coordinate representation
In particular, the unique coordinates of point are
An -dimensional affine space has at most affinely independent points. This matches the count of origin + vectors numerically
If instead of , although the coordinate does not change with origin change, it is not an affine point
[affine_map_point_ver] alias [simplicial_map] Affine map := A map taking points of another affine space as vertices to points , for non-vertex cases
Affine map <==> After choosing origins for two affine spaces, for the two linear spaces, linear map + translation
Note that linear maps and translations do not commute. Example: in
- Rotate by degrees first to get , then translate by to get
- Translate by first to get , then rotate by degrees to get
[convex_hull] := the affine combination of with the additional restriction
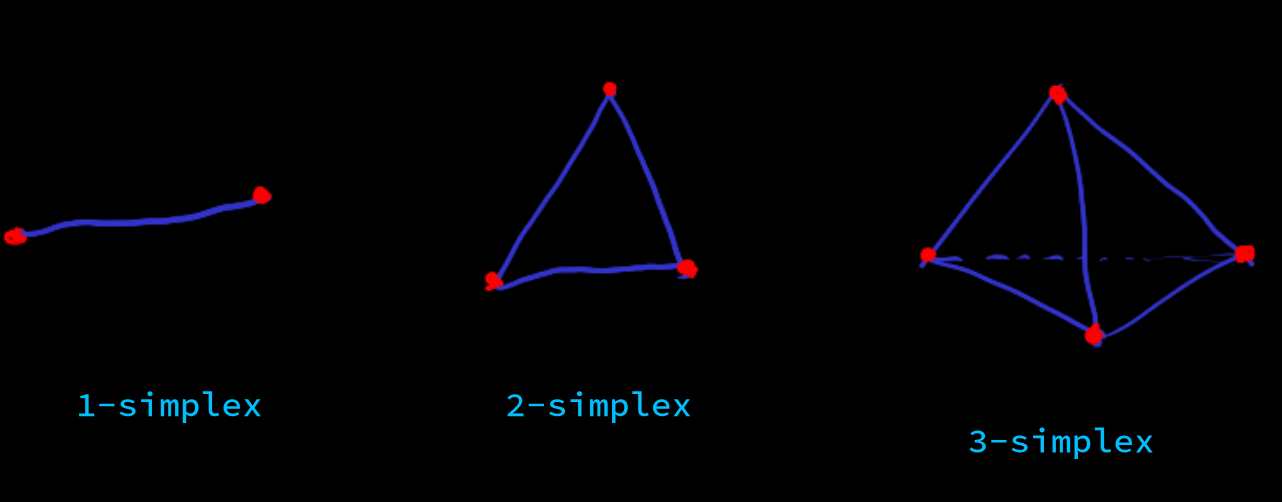
[simplex] := convex hull formed by affinely independent points
[extreme_point_of_convex_hull]
Prop Extreme points already generate the original convex hull, and are the minimal generating set
Proof Continuously eliminate redundant points from and . Extreme points belong to the convex hull and cannot be generated by other points, only by themselves, so they are necessary for generating the convex hull
Prop The extremum of an affine function with domain and codomain can be attained at extreme points
Proof
Suppose the extremum is attained at
is generated by extreme points
Define the extremum of function values at extreme points
is affine, so
Thus . Hence the extremum can attain the extreme value at the extreme point
Let finite-dimensional real affine space and its vector space
Def := interval of := convex hull generated by
Def := open interval := convex hull generated by , with the additional condition
Def [convex] convex set :=
Prop Intersection of convex sets is convex
The following references ref-34
Def [core] Similar to topological interior.
Prop [finite_intersect_preserve_core] . Proof is obvious. uses
Def [linearly_accessible] Similar to topological closure.
Prop
let convex
Prop let . then . Corollary:
Proof
let . let
We need to show
Need to show there exists such that
Since , there exists such that
Since is convex, . Let to conclude
Prop [core_open_interval_core] let , let . then
Proof
If then reduce to previous prop
Since , there exists such that
Since , there exists such that
let . For , there exist such that
Since is convex, , therefore
Since this holds for all , there exists a slightly larger such that
Since , by the previous proposition, , thus
Prop convex ==> convex
Proof Follows from previous propositions
Prop convex ==> convex
Proof
let . We need to show
According to the definition of linearly-accessible, there exist such that
By convexity,
Either , then
Or
This implies there exists
Thus
Def [boundary]
Affine maps do not preserve boundaries. A simple counterexample is mapping a tetrahedron in to a rectangle in via an affine map determined by vertex correspondence
Prop Let , then satisfies for
Proof Otherwise, if there exists such that , then leading to a contradiction
Prop convex & ==>
Proof
is obvious
let
Take
let
Since , there exists such that
Thus
Therefore
Prop convex & ==>
Proof
is obvious
let
let
Then
Take . By the definition of ,
Note: It is possible that in but in an affine subspace of
Prop convex & ==>
Proof
Prop [finite_intersect_preserve_convex_closed]
Proof It is easy to see
Def convex open , convex closed
We can define convex hull for general sets
Def
Proof (of convex)
let
let . Consider
Sum of coefficients
If is convex then . In particular, for general ,
Def := the smallest dimension of an affine subspace containing
Prop [full_dim_iff_core_nonempty]
Proof core nonempty <==> can span linearly independent directions
Prop
Proof When number of points , they are affinely dependent, and there are redundant points
Prop [convex_of_union] Let be convex, then
Proof
Use block summation technique. For , consider
where
Prop Let be convex and . Then there exist convex such that (i.e., complements) and
Proof
Define a partial order on convex set pairs containing respectively and disjoint:
By maximal_linear_order_exists, take a maximal linearly ordered chain, take the union of the components of the pairs respectively, denote the result as
It is easy to prove . We also need to prove
Suppose
Obviously , by the maximality of in the partial order,
Take . Since , . By convex_of_union, , thus there exists such that
Similarly, take , , there exists such that
are three distinct points, forming a triangle. Within the triangle it is easy to prove . But , leading to , a contradiction
Let be convex and complements. Let
Prop
Proof
let
Since are disjoint, contradicts , contradicts
Thus and
Therefore and
Hence
Since are complements, , thus
Thus
Prop
Prop
Proof If or it is obvious. Assume . Define . Take the supremum of to get
Prop If , then is a hyperplane
Proof
-
is flat
Take . We need to show
Suppose there exists such that . Assume . Since , by core_open_interval_core, , contradicting
-
Take as origin. Take . Suppose , then , there exists and such that . If , replace with
Prop [hyperplane_separation] Hyperplane separation theorem. Let be convex and , then there exists a hyperplane separating
Note: Separation means , not strict separation
Prop separates
Def [support_hyperplane] Supporting hyperplane: lies on one side of hyperplane and
Prop If and then (i.e., ) Proof cannot be in , and
Prop let , let , then there exists a supporting hyperplane with
Proof Apply the hyperplane separation theorem to , because . Hence . Take , then , by contradiction we get , thus
Prop . Proof Proof by contradiction: take , using the definition of and the definition of separating hyperplane leads to a contradiction
Prop Affine subspace with and , let . Then there exists a supporting hyperplane of with
Proof Let . Let . Then . If , take . Then spans the one-dimensional complement of . But we have the following contradictions
- The one-dimensional complement of is not
The following references ref-35
Def [order_of_boundary] The intersection of all supporting hyperplanes at is an affine subspace, the order is defined as its dimension
Def [vertex] Vertex := boundary point of order
Prop [bd_convex_hull_core] let . if , then
Prop [bd_convex_hull_bd] let . if , then
Proof is convex and so . if not then , hence , contradicting
The above two propositions can be generalized to (assuming are already extreme points of )
Prop [support_hyperplane_at_core_of_convex_bd_subset] Let be convex, let be the affine subspace spanned by , then any supporting hyperplane containing (core in ) satisfies , hence
Proof
Let . If , then , thus spans the complement space of , therefore
But and for sufficiently small near ,
contradicts
Prop
is possible. Consider the cube in . Consider . Consider . Then
Prop If there exists such that (this property is called is an exposed face) then and thus
Prop Duality between vector space hyperplanes and linear functionals. Vector space hyperplane <==> there exists a linear functional such that
Since , the subspace in the dual space of corresponds to the subspace of
Prop Duality between vector subspaces and subspaces of linear functionals. A -dimensional vector subspace of <==> an -dimensional vector subspace of . The direct connection is
Proof Choose a basis of . Then a basis of corresponds to
Prop . Proof
Prop The linear functionals corresponding to hyperplanes span an -dimensional subspace in <==> is a -dimensional subspace of
Prop is a vertex <==> there exist hyperplanes , the corresponding linear functionals are linearly independent, forming a basis of , and
Prop If , then , thus
Prop
Proof Let , then thus
Prop
Def Sum of subspaces
Prop Dimension of intersection of subspaces
Proof
where
is the composition of two embeddings . Similarly for
is surjective
satisfy the exact sequence property: injective, surjective,
By linear algebra
Therefore
Prop The two sides of an affine hyperplane are
Prop (Similarly for )
The following deals with the equivalence of two descriptions of polytopes
- Convex hull of a finite set of points
- Bounded intersection of half-spaces
Assume are already extreme points. Assume already span ; otherwise, work in the lower-dimensional affine subspace they span.
Prop For each hyperplane not containing the origin, there exists a unique such that
Proof A vector space hyperplane corresponds to a one-dimensional space spanned by in
The equivalent equation is , where
[pole] In a coordinate system, can be expressed as , corresponding to
[polar_hyperplane] Conversely, in a coordinate system, gives the hyperplane
There is a one-to-one correspondence between
- Affine hyperplanes not containing the origin
Prop
Proof
[polar_dual] let .
Prop
Proof
The definition of tells us that for
Hence
Prop If for every there exists a hyperplane with semi-strict separation , then and thus
Proof
We prove that if
But the definition of is
Let correspond to . In the “if” branch
Let correspond to . In the “then” branch
Thus
Prop If
- is convex
- (convex closed)
then for every there exists a hyperplane semi-strictly separating and
Proof
Take
Consider
For
- By definition of core, there exists such that
has a supremum
. Since (convex closed), , thus , hence
There exists a hyperplane separating the convex set and the convex set
The line segment can be linearly extended into the interior of , so is not a subset of ; instead, lies in the direction of the complement space of
Thus semi-strictly separates and
Prop If then
Proof
let
so
Prop satisfies
- convex
- (convex closed)
Proof
For , let , with , with
Then
Choose sufficiently small so that
- (convex closed)
==> there exists such that , i.e., for every ,
is composed of the union of simplices formed by taking points from :
The vertices of each simplex are affinely independent, and the line segment has a unique affine coordinate representation in it:
For a given , the solution set of these inequalities on forms a closed interval
Hence
is a closed interval in , hence the closure of also belongs to , thus belongs to some
also implies , thus
Therefore , thus (convex closed)
Prop
Proof
if , then
, then
so
Prop
Proof
Prop satisfies
- convex
- (convex closed)
Proof
- . , choose sufficiently small
- let .
i.e.,
This is a continuous function of with values in , let to get , hence
let convex, ,
Prop Let . Then is a supporting hyperplane of , supporting at the point , which is the polar-dual of the supporting hyperplane of at
Proof
By the definition of ,
Hence is a supporting hyperplane of , supporting at , and
Prop These are all possible supporting hyperplanes of
Proof
Let be a supporting hyperplane of , supporting at
Then is a supporting hyperplane of supporting at
Hence is a supporting hyperplane of , supporting at
Def A polytope generated as the convex hull of a finite set of points is called a V-polytope (Vertex). A polytope generated as a bounded intersection of half-spaces is called an H-polytope (Hyperplane)
Prop An H-polytope satisfies
- convex
- (convex closed)
Proof Each satisfies the above two conditions, and a finite intersection also satisfies them
Analogous to extreme points of V-polytopes, H-polytopes have extreme hyperplanes. For , if , then is redundant and can be removed.
[extreme_hyperplane] Def Extreme hyperplane := one that cannot be expressed as containing the region defined by the intersection of other half-spaces
Prop Extreme hyperplanes already generate the original H-polytope and are the minimal generating set
Proof Similar to extreme points, continuously eliminate redundant hyperplanes
Let the H-polytope have . Assume the are already extreme hyperplanes
Def [facet]
Prop A facet is an -dimensional H-polytope
Proof
For , or is an -dimensional affine subspace. So it’s easy to see that is also an H-polytope
We show that has nonempty core in
Define
. The proof uses
Because it’s an extreme hyperplane,
Hence there exists
Take , then
Therefore
The 1-dimensional and the -dimensional intersect at a point
is -dimensional, so can emit in all -dimensional directions, particularly in all directions within , thus , hence . Therefore is -dimensional
Prop (thus facets of an H-polytope are supporting hyperplanes)
Proof
Consider
Therefore
i.e.,
Def Recursively define the -faces of as the facets of the -faces of
Prop Recursively, -faces come from intersections of certain facets (-faces)
Def Two -faces are adjacent if their intersection is a -face
Prop Let . Then the intersection of all supporting hyperplanes of equals the intersection of all facets containing . Proof Facets span the extreme hyperplanes, so if a supporting hyperplane is not spanned by a facet, it is redundant
Def [extreme_point] An extreme point of a general convex set is defined as such that is convex
Prop and convex ==> . Proof ==> is not convex
Prop is an extreme point <==>
Prop is an extreme point <==>
Prop Vertex ==> extreme point (for general convex set )
Proof
We prove non-extreme ==> non-vertex
Non-extreme ==> there exist such that
By support_hyperplane_at_core_of_convex_bd_subset, , thus is not a vertex
Prop For an H-polytope , if , then lies in the core of some -face
Proof
By support_hyperplane_at_core_of_convex_bd_subset, if , then is not in the core of an -face, so it lies in a facet of an -face
Recursively, until lies in a facet of a -face, then could be in
- the core of a -face, or
- a facet of a -face
But the latter recursively gives
Prop The number of -faces is finite. In particular, the number of -faces, i.e., vertices, is finite
Prop For an H-polytope, vertices are exactly the extreme points
Proof
In general, extreme point does not imply vertex. Consider the parabola in . At , the only supporting hyperplane is , so , but is an extreme point
Prop For a V-polytope , we have
Proof
, so
Suppose , then , thus
Hence . Therefore
We have already assumed is an -dimensional region, but if it is of dimension , might not be bounded
Def [bounded] Bounded := The intersection of every line with is a bounded interval
Prop The endpoints of the bounded intersection interval lie in
Prop If bounded and (convex closed), then the intersection of a line with is a closed bounded interval
Assume is bounded and convex closed from now on
Prop
Proof Take , take a line containing , it intersects in a closed interval whose endpoints lie in
Prop An affine subspace of is convex closed. Proof Cases with dimension have been proven. For dimension , it is the intersection of convex closed sets, hence by finite_intersect_preserve_convex_closed, is also convex closed
Prop If there exists an affine subspace of such that , then in and in are the same, thus
Proof Obviously in implies in . Conversely, let be in in , then there exists such that , and since is convex closed, , hence belongs to in
Prop If , then the convex hull of in and in are the same
Prop in and in are the same, thus
Prop Let be a supporting hyperplane, then
Proof
:
let . Since are convex closed, is also convex closed, thus
Hence and
Need to show
let
If then
Then
Thus
Hence
The case is similar
If , then , and since , we have
Therefore
:
let
Since are convex closed, is also convex closed
Thus , so , hence
Need to show
let . Since and , we have
Thus
Prop Extreme points exist, i.e., , and
Proof
Induction on dimension. In one dimension, it is a closed bounded interval, extreme points are the endpoints
We have already proven and , so we only need to prove
Let . Take a supporting hyperplane of
is convex closed and bounded, thus is convex closed and bounded in . Moreover
, by induction,
However
Thus , hence
Prop Bounded H-polytope ==> V-polytope
Proof
Finite number of vertices ==> finite number of extreme points,
Bounded ==> extreme points generate , i.e.,
Prop -dimensional bounded H-polytope ==> -dimensional V-polytope
Prop If is a V-polytope, then is bounded
Proof
let
let
let
Since , has lower and upper bounds, as well as a supremum and infimum
Prop In spaces of dimension , if is a
- line segment
- ray
- line
not passing through the origin, then its polar-dual is:
- the intersection of two half-spaces defined by hyperplanes not passing through the origin
- the intersection of a half-space defined by a hyperplane not passing through the origin and a half-space defined by a hyperplane passing through the origin
- degenerate to dimension
Proof
- Let . Then
-
Let
Expanding gives
For this inequality to hold for all , we need . And for , we need
is a half-space defined by a hyperplane not passing through the origin. is a half-space defined by a hyperplane passing through the origin
-
Let
For to hold for all , we need , which is an -dimensional hyperplane passing through the origin
Prop Let be an -dimensional V-polytope. Choose a point in as origin to establish a coordinate system. Then
- the polar-dual is bounded, hence is a bounded H-polytope
- contains the origin, hence by full_dim_iff_core_nonempty, is -dimensional
Proof
-
Let , then , thus .
is a line segment, ray, or line, but contains the origin, so forces to be the intersection of two half-spaces defined by hyperplanes not passing through the origin, hence is a line segment
-
and each contains the origin
Prop -dimensional V-polytope ==> -dimensional bounded H-polytope
Proof is an -dimensional V-polytope ==> Choose a point in as origin to establish a coordinate system. is an -dimensional bounded H-polytope and contains the origin ==> is an -dimensional V-polytope ==> is an -dimensional bounded H-polytope
Prop -dimensional V-polytope <==> -dimensional bounded H-polytope
Prop Let be a bounded polytope, let be an affine function, then is a bounded polytope. Proof Use V-polytope representation
Similar to the V-polytope case, the extremum of an -valued affine function can be attained at extreme points, according to
More generally, the maximum of a continuous convex function () or the minimum of a continuous concave function ( is convex) can be attained at extreme points
[convex_hull_decomposition] convex hull can be decomposed into simplices in the following way
- The vertices of the simplices belong to the vertices of the convex hull
- The interiors of the simplices are disjoint
- The union of the simplices is the convex hull
The decomposition is not unique
Example
points in
points in
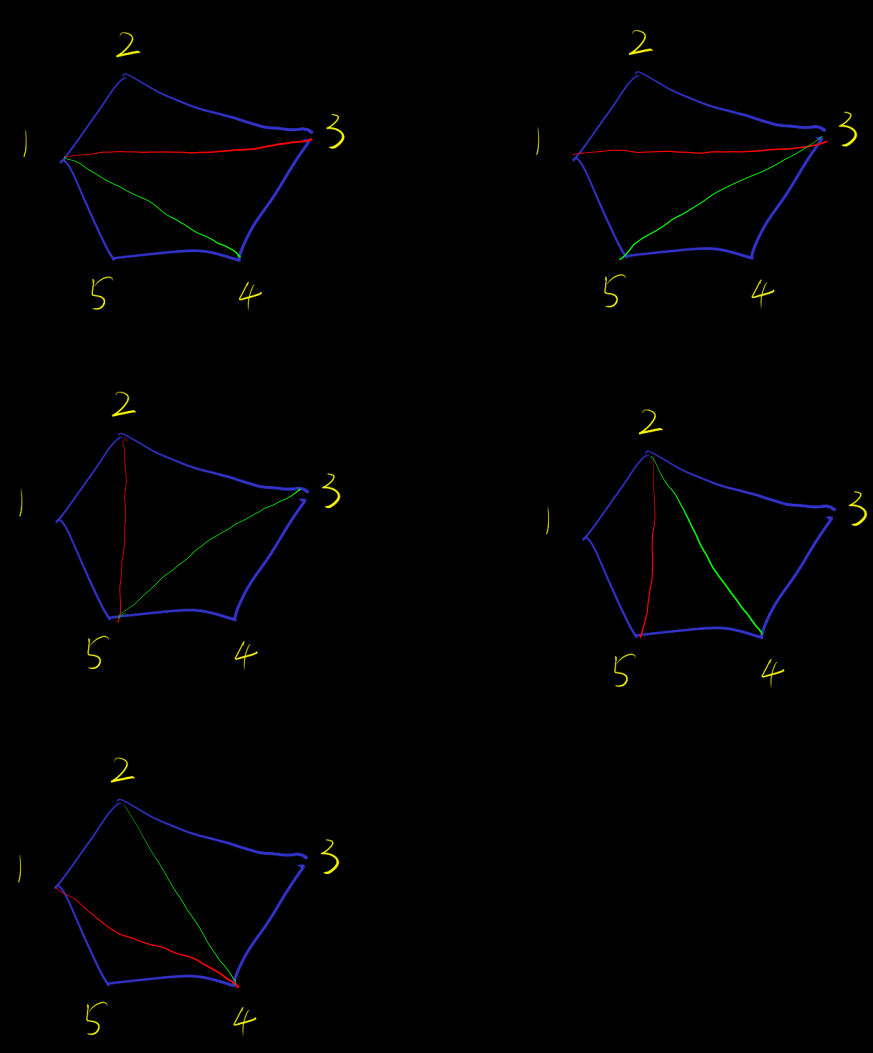
According to the above figures, one can intuitively prove the decomposition of a convex hull into simplices as follows
Proceed by induction on dimension. Take a vertex
Classify the facets into
- those containing
- those not containing
can be decomposed into the cones formed by and the facets that do not contain
Each is a convex hull of one lower dimension and can be decomposed into dimensional simplices
These simplices together with form dimensional simplices
The convex hull is decomposed into these simplices
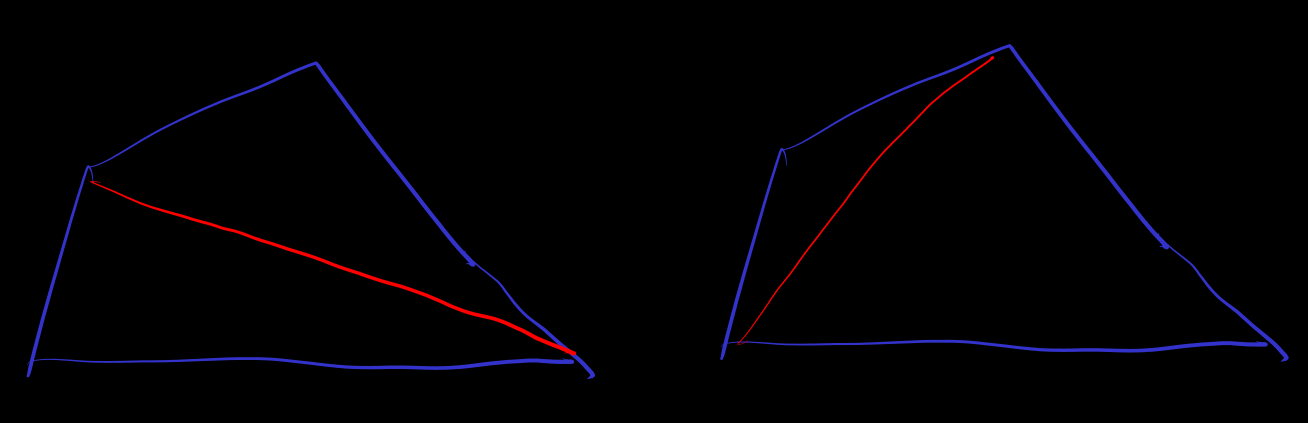
Prop [opposite_facet] Let be an -dimensional bounded H-polytope, and let be an extreme point of . For any , the ray () starting from and passing through intersects at a unique point such that . Then must lie on some facet that does not contain .
Proof
Since is bounded and convex closed, the ray will leave for sufficiently large . Let , and let the boundary point be .
Suppose is formed by the intersection of halfspaces .
According to a known result, the boundary equals the union of all facets: , where .
Since , there must exist some facets containing . Let the index set of facets containing be .
We proceed by contradiction. Assume that all facets containing also contain , i.e.:
Since and , and is an affine hyperplane, the entire line lies within . Hence for all , the ray . This means the ray never violates the halfspace constraints for those indices in .
For hyperplanes with , we have and , so must lie strictly in the interior of those halfspaces, i.e.:
is an open set, and there are only finitely many hyperplanes not in . This means, moving slightly forward from along the ray direction (i.e., ), the ray will still remain in the interior of all .
Now consider the point :
- For , (since the whole line lies in ).
- For , (because is small enough not to exit ).
This shows .
But this contradicts the fact that is the “maximum parameter” () for which the ray remains in .
The contradiction shows the assumption is false. Therefore, there must exist at least one index such that and .
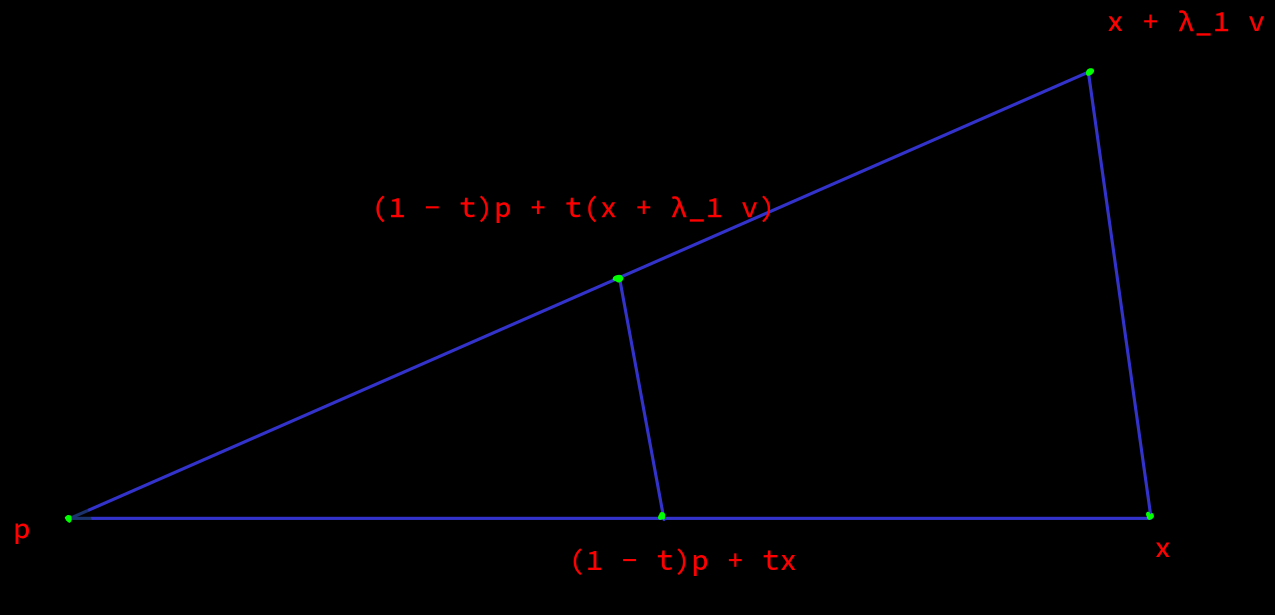
Prop [simplex_vertex_core_ray_to_facet_core] Let be a simplex generated by affinely independent extreme points, and let be its facet not containing . If , then the unique intersection point of the ray () starting from and passing through with the hyperplane containing must satisfy .
Proof
Since the vertices of are affinely independent, any point in space can be uniquely expressed as an affine combination of these points.
In particular, because , has strictly positive affine coordinates:
where , all , and .
Now write the equation of the ray from through :
Since the affine hyperplane containing is spanned by , the condition for the ray to intersect this hyperplane at is equivalent to: the affine coordinate of with respect to equals .
Set the coefficient of to :
Since , there is a unique intersection point, and (consistent with the intuition that the ray extends outward).
Substitute the obtained back into :
The affine coordinates of with respect to are strictly positive: because and , we have , which is equivalent to , i.e., .
Prop [convex_hull_decomposition_to_simplices] A convex hull can be decomposed into simplices satisfying:
- The vertices of the simplices belong to the vertices of the convex hull;
- The interiors () of the simplices are mutually disjoint;
- The union of the simplices is the convex hull;
- (Simplicial complex intersection property) For any two simplices , their intersection is either empty or a common face of and .
Proof
Proceed by mathematical induction on the dimension of the polytope .
To ensure that the decompositions of adjacent faces are perfectly consistent on their intersections (thus guaranteeing condition 4), we pre-specify a global strict total order on the vertex set of before starting the induction (e.g., assign indices to vertices ). In each recursive step below, we always select the smallest vertex according to this order as the apex for the cone.
Base case: (a point) or (a line segment). Each is itself a simplex, satisfying all conditions, and the intersection property holds trivially.
Inductive step: Assume the decomposition statement holds for all V-polytopes of dimension .
Let be an -dimensional V-polytope. Let be the smallest vertex among all vertices of according to the global total order.
Find all facets ( faces) of that do not contain , denote them by .
By the induction hypothesis, each is itself an -dimensional V-polytope and can be decomposed into a set of -dimensional simplices .
For each -dimensional simplex in each , construct an -dimensional simplex .
Collect all such to form the decomposition set of . We now prove that satisfies the four required conditions:
Condition 1 (Vertices are extreme points):
Condition 3 (Union equals ):
Clearly all , so .
Conversely, take any . If , then is obviously included. If , consider the ray () from through . Because is bounded and convex closed, this ray must eventually exit , ending at .
According to opposite_facet, lies on some facet that does not contain . Since is covered by its subset , there exists such that .
lies on the segment , thus . Hence covers the whole .
Condition 2 (Interiors are disjoint):
Let and be two distinct simplices.
Suppose there exists . According to simplex_vertex_core_ray_to_facet_core, the ray from through extended outward to will intersect and at points and respectively.
- If belong to the same facet , then by the induction hypothesis, their interiors in intersect, implying and hence , a contradiction.
- If with , then , which belongs to the -dimensional boundary and cannot lie in the -dimensional interior of either, a contradiction.
Hence .
Condition 4 (Simplicial complex intersection property):
Let . Consider any point . Let the ray from through extended outward to intersect and at points and respectively.
(Key consistency): If and belong to different facets and , they intersect at . Because we have consistently used the same global total order on vertices throughout the induction, the simplicial decompositions of and on their common intersection are identical.
Therefore, by the induction hypothesis, on this lower-dimensional face, is either empty or a common face of and .
- If empty, no such exists, so .
- If they intersect in a common face , then , implying .
Since is a common face of and , the cone generated by adjoining the apex is naturally a common face of and .
The intersection of convex hulls is a convex hull. This is easy to prove using H-polytopes
Example
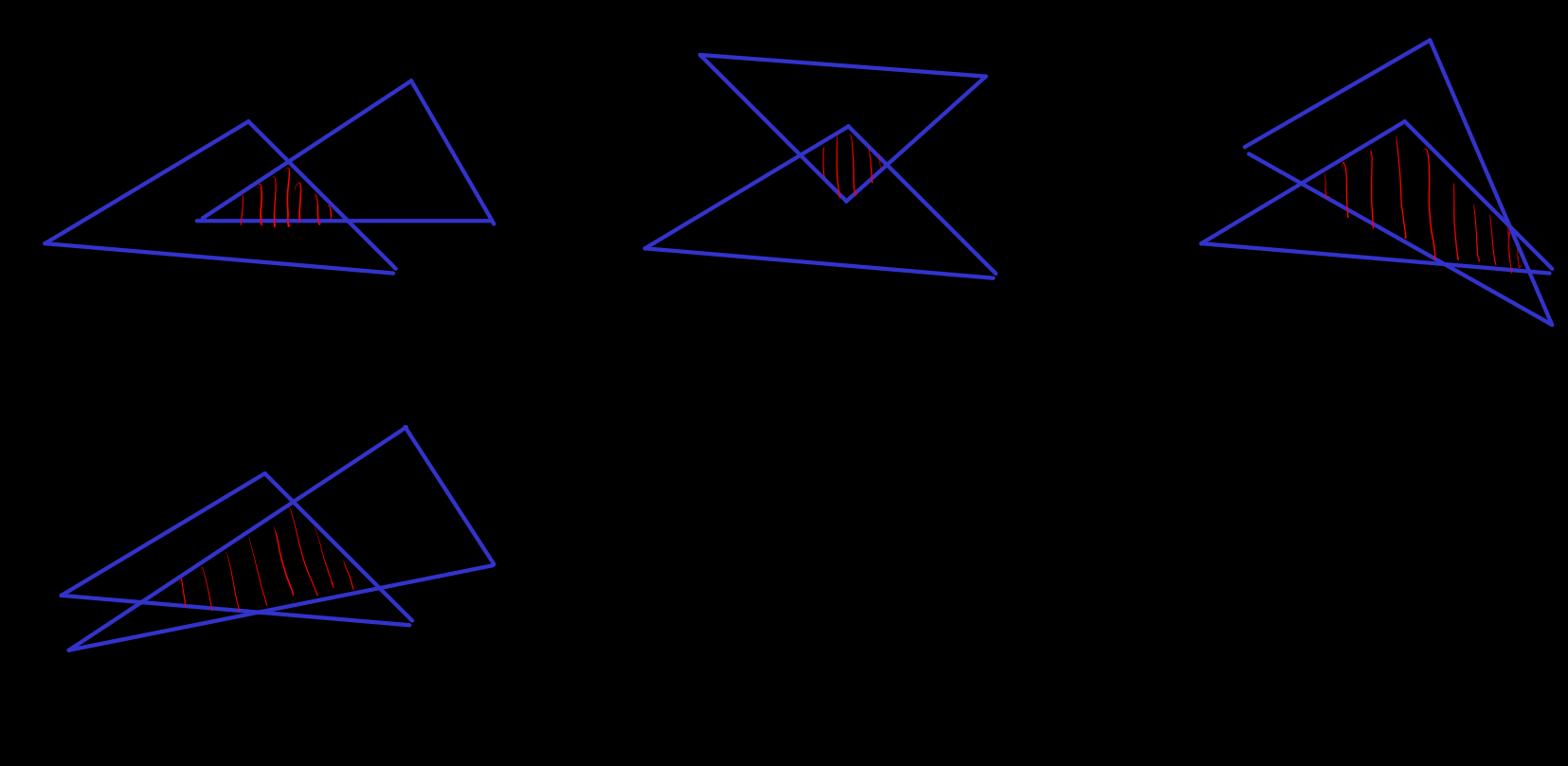
Prop The set difference of convex hulls may not be a convex hull. However, (intuitively) it can still be decomposed into convex hulls
Proof (from LLM)
Let be two bounded polytopes (e.g., simplices). Polytopes are usually closed sets; their pure set difference may not have a closed boundary, so one typically works with the closure of the set difference, i.e.,
Since we have proven the equivalence of V-polytopes and H-polytopes, we can view the subtrahend as an H-polytope. Let .
Then the interior of is .
The complement of the interior of is:
Thus the set difference we want to decompose can be written as the intersection of with the union of halfspaces:
Here, the set difference is expressed as a union of regions. However, these regions may have overlapping interiors.
To make the interiors of these regions disjoint, we use the Sequential Cutting technique to construct disjoint blocks:
Intuitively, this means: first cut with the first hyperplane, call the outside part ; then cut the remaining part of with the second hyperplane, call the outside part , and so on.
Prop The set difference of simplices can be decomposed into simplices
Prop Let have a positively oriented basis . For a simplex , the two orientations induced on any -dimensional face by the two intersecting -dimensional facets that meet at are strictly opposite (i.e., the boundary of the boundary is zero).
Proof
Let and let be -dimensional.
For convenience, place the local origin at the interior () of . Then the affine hyperplane containing can be regarded as an -dimensional vector subspace, denote it by . Choose an arbitrary basis of .
Since intersect at and are distinct, their containing -dimensional hyperplanes are also distinct. Choose a vector with such that points strictly from into the interior of . Similarly, choose a vector with such that points strictly from into the interior of .
can be represented as , as . Near , the interior of simplex is precisely sandwiched between and , entered by strictly positive linear combinations of and . That is, for a point local to :
Now we derive the criteria for and according to the defined orientation rules:
1. Orientation induced by :
We need a vector pointing from into the interior of . Since lies in the region where , increasing moves into the interior of (). The vector provides a positive component, so we can directly choose .
Next, we need a vector pointing from into the interior of . By definition of , it perfectly satisfies this condition, so we choose .
Thus, the basis is positively oriented under if and only if the following basis of is positively oriented:
(i.e., the determinant of the transition matrix from to is ).
2. Orientation induced by :
We need a vector pointing from into the interior of . Since lies in the region where , increasing moves into the interior of (). The vector provides a positive component, so we can choose .
We need a vector pointing from into the interior of . By definition of , we choose .
Thus, the basis is positively oriented under if and only if the following basis of is positively oriented:
3. Compare determinants to prove opposite:
Carefully compare the two bases and of :
Notice that is obtained from by swapping the last two columns. According to a basic property of determinants in linear algebra, swapping two columns of the transition matrix strictly changes its sign:
This means, for any chosen basis of , if it yields (i.e., positive orientation under rule ), then necessarily (negative orientation under rule ).
Therefore, the induced orientations and are geometrically strictly opposite. QED.