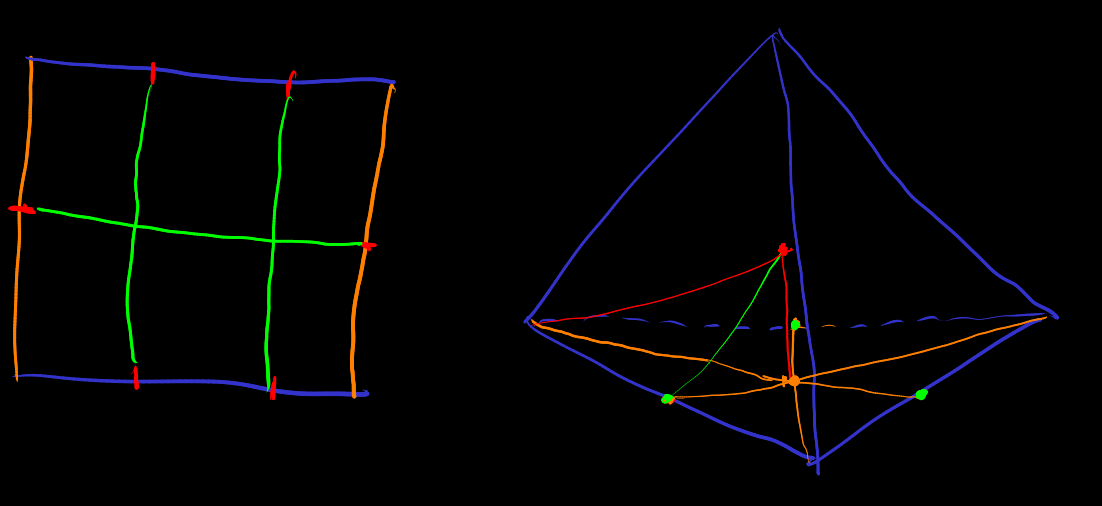
[parallelogram] Due to symmetry, a parallelepiped described by the convex hull of points can be simplified to an -point description. After selecting the origin,
, without requiring
[parallelogram_simplex_correspond]
A parallelepiped can be decomposed into simplices that are equivalent by translation and reflection (p. 587 of ref-3)
Selecting one simplex from the simplices in the decomposition corresponds to selecting a permutation of and imposing constraints on the parallelepiped coordinates:
The vertices of the corresponding simplex are:
Its affine combination representation is:
Expanding factors in the affine combination and comparing coefficients of yields the relationship between parallelepiped coordinates and affine coordinates:
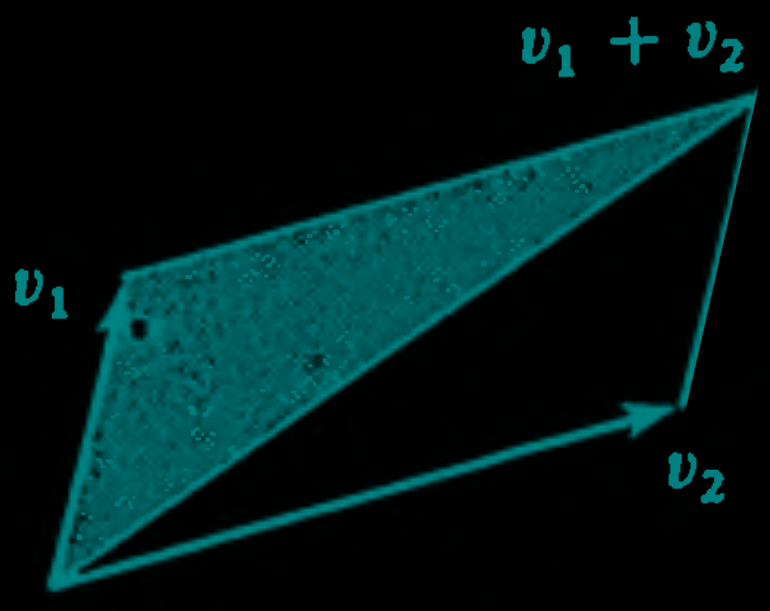
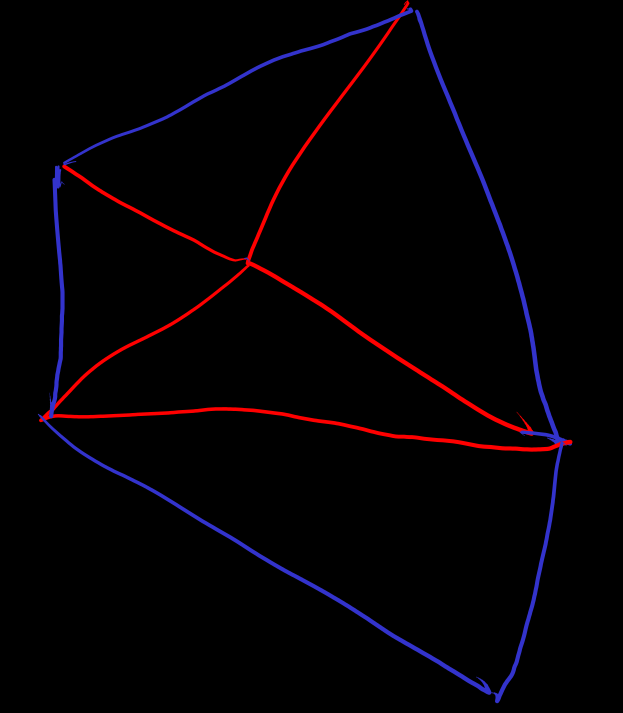
Conversely, a simplex also gives many parallelepipeds for which it serves as one of the constituent simplices. For example, the relationship between a triangle and a parallelogram. In general, selecting one vertex of a simplex allows one to establish a coordinate system and construct a parallelepiped.
Thus, the structural strength provided by simplices and parallelepipeds is comparable.
[volume_of_parallelogram] For volume in , assume:
- Translation invariance
- Reflection invariance (unsigned volume)
- Finite disjoint decomposition (disjoint in the sense of zero measure) ==> finite additivity of volume
- If are not linearly independent, then they and their affine/linear combinations lie in a lower-dimensional subspace, and thus the -dimensional volume is defined to be zero.
[volume_of_simplex] is of volume-of-parallelogram
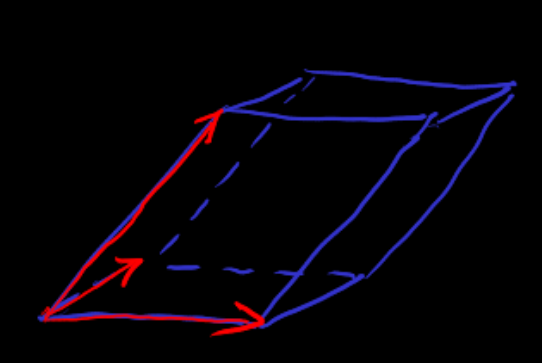
[shear_transformation] After decomposing a parallelepiped into simplices, select one simplex, cut it, translate it, and form a new parallelepiped with the same volume. This is called a shear transformation. E.g., . As shown below:
(image from p.587 of ref-3)
To consider the change in the volume of a parallelepiped under a linear transformation, one usually decomposes the linear transformation into multiple “elementary linear transformations”, which include shear transformations.
Shear transformations require the use of simplices, indicating that even though we define the volume of a parallelepiped, we still simultaneously use the concept of the volume of a simplex, once again verifying the close connection between simplices and parallelepipeds.
The volume invariance under shear transformations is algebraically e.g. or
Scaling the edges by gives -linearity of the volume. E.g.
Scaling and shearing of parallelepipeds correspond to the decomposition of into elementary linear transformations, also used in Gaussian elimination, although they can also be applied to matrices.
[volume_determinant] For volume change under of a parallelepiped ,
Choose a basis of , define the volume of the parallelepiped they generate as , then the volume of another parallelepiped is .
This is oriented volume. ; the set of the parallelepiped remains the same, so the absolute volume is unchanged, but the orientation of and is opposite.
Oriented volume = unsigned volume + orientation factor
linearly dependent ==> lie in lower-dimensional subspace ==> zero volume. Here we can extend to , and zero volume corresponds algebraically to
Associate the parallelepiped with the decomposable element of the -th order alternating tensor of .
is an -fold tensor whose -linearity comes from the linearity of scaling the lengths of the edges of the parallelepiped.
Why can the concept of volume be positive, yet the -alternating tensor be negative?
Negativity arises from extending edge scaling from (only the direction) to the direction of , as a fully linear operation.
Any linear transformation can be decomposed into scalings and shears. Shears do not change volume, so the effect must come entirely from scalings, including transformations like “swapping the order of basis vectors,” e.g., . However, this is not intuitive.
Example The 2D case, easily generalizable to any two vectors in dimensions:
- Shear does not change volume.
- Shear .
- Shear .
- Scaling by yields volume .
You can also choose to discard the concept of negative volume entirely, saying volume is a positive multilinear alternating form, a positive determinant, similar to the treatment of densities on manifolds.
[try_to_define_volume_of_low_dim] View a -subspace as a manifold; for example, choose a -basis on it to establish coordinates, then it has its own volume. But contains many -subspaces. If we only need to consider one -subspace or -submanifold, the problem stops there. However, we want to define volume for all -subspaces simultaneously, choosing a -basis on each -subspace to establish a coordinate system defining the -volume of that -subspace, and for each , what is a good choice?
Consider two approaches. Similar to linear forms vs. quadratic forms. Both definitions of volume coincide for .
- A basis of gives a basis of the alternating tensor space:
Use it to define volume: for each , the volume is a -form on satisfying , forall
For a general parallelepiped , the volume is:
Under this volume definition, the volume of a nonzero decomposable alternating tensor can be zero. Consider , such that . is a -st order decomposable alternating tensor of . .
Under this volume definition, as shown by in the example, the volume preservation property of shear transformations for -th order volume in does not hold for order volume in .
Question A specific basis is chosen, so which other bases yield the same result? Or what is the linear subgroup that preserves all orders of linear-form volumes?
The preserving all orders of volume satisfies, for and for , , or
Example (sum of elements of the -th column of matrix ). The situation for is analogous to that for , i.e., for corresponds to the cofactor of for .
The cofactor is the determinant of the matrix with the -th row and -th column removed, or used in the decomposition representation of as an -alternating tensor. Cofactors generalize to the -alternating tensor decomposition representation of or the Laplace expansion of the determinant.
Example .
In , preserving all volumes satisfies:
One coordinate representation of the solution to this system is:
This is an affine line in passing through . or is not a subset. , so generally not in .
- Choose a non-degenerate quadratic form.
Induces a quadratic form on the alternating space: .
Unsigned volume is defined as the absolute square root: or .
Choose an orthonormal basis .
.
Quadratic form:
<==> zero volume.
In the non-Euclidean case, light-like vectors have an effect.
Different signatures yield different volume definitions for the same set for orders .
[polyhedra] Polyhedron := finite union of n-simplices. Countable generalization yields countable polyhedra.
[Lebesgue_measurable]
Lebesgue measurable set . Approximation by finite union of simplices, with the symmetric difference covered by countably many simplices to estimate the measurement error.
Specifically, define the outer measure of a set as if is finite. The outer measure of polyhedra is finite, and under the Euclidean metric, by compactness, subadditivity can be proven. Hence, the outer measure of a polyhedron is its own volume (In geometries with signatures other than Euclidean, not all polyhedra are likely used to define volume).
Among sets with finite outer measure, using the outer measure of the symmetric difference as a distance yields a metric space (ref-12). (Distance zero does not need to imply equality.) Polyhedra form a metric subspace. Volume of polyhedra is a real-valued function on them, which can be shown to be continuous via ; the essence of the proof uses .
Consequently, measurable sets are defined as the closure of the family of polyhedral sets in the outer measure metric space. The measure of a measurable set is defined as the continuous extension of the polyhedral volume function to its closure.
The definition of the integral will follow a similar method.
Non-measurable sets are those with finite outer measure but not belonging to the closure of polyhedra. Non-measurable sets exist (Vitali sets defined using the axiom of choice).
[Lebesgue_measure]
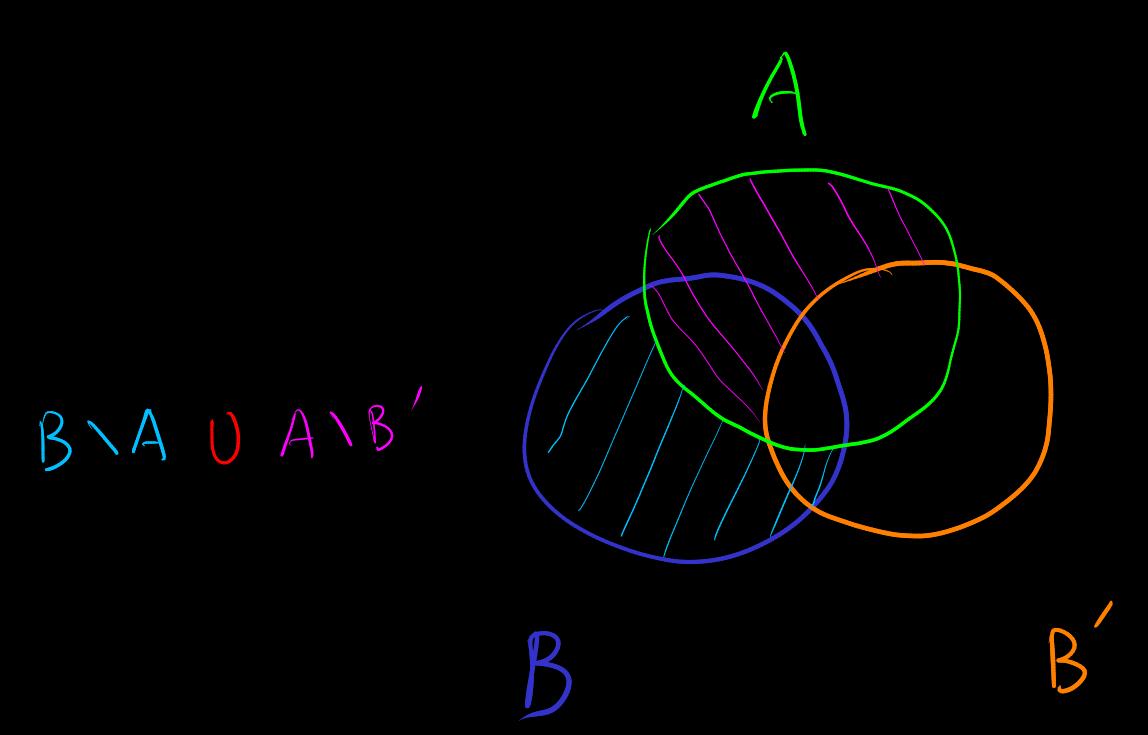
The symmetric difference of sets satisfies:
Corresponding to the triangle inequality .
Proof
because:
The other side is similar:
Taking the union of both results gives:
Triangle inequality:
[try_to_define_low_dim_measure] Attempt to define dimensional measurable sets in . Since the codimension of a -region is , it is clearly not possible to approximate general “-dimensional sets” by set differences and simplex covers for measurement error estimation.
[pathologic_example_measure_of_boundary]
Using the Euclidean metric structure, some low-dimensional measurable sets can be defined, but pathological examples still exist (ignore details for now, consult Wikipedia).
- The painter’s paradox. Finite measure but boundary of infinite measure. Uses unbounded regions.
- Koch snowflake. Finite measure but boundary measure is undefined or infinite. Uses a boundary that is nowhere differentiable.
Examples where the -dimensional volume is approximated but the boundary volume is not:
- Schwarz lantern.
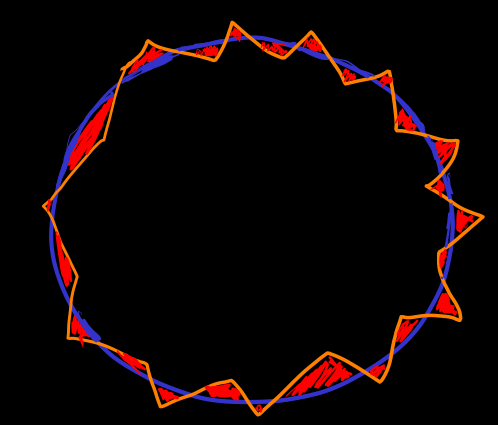
- Infinite staircase approximating the hypotenuse of a right triangle or a circle () or, with large normal oscillations, .
[measure_theoretic_boundary]
Measure-theoretic boundary. Dimension — some supremum — may not be a natural number but a real number.
For a general measurable set, intuitively, the boundary =
where refers to the overall scaling to the center of any convex hull centered at .
Or boundary = not interior or exterior. Interior = limit , Exterior = limit .
Lebesgue differentiation theorem states that the measure of the boundary is zero.
- Interval subdivisions of the edges of a rectangle/parallelepiped yield rectangular product subdivisions.
- Barycentric subdivision (note that the boundary is also subdivided).