Consider the subspace
The following are equivalent
- not co-linear
if , according to the intuition of (draw a picture), bases of the following types are all possible
- 2 time(-like)
- 2 space
- 1 time, 1 space
- 1 time, 1 light
- 1 space, 1 light
- 2 light
Example
-
2 time(-like)
, where
can linearly generate , thus spanning - 2 space
, where - 1 time, 1 space
- 1 time, 1 light
- 1 space, 1 light similarly
- 2 light
Example . Note .
generate
Consider a general in
[signature-of-2d-subspace-of-spacetime] Prop The possible signatures of a in Minkowski are
We will prove later that signatures are impossible
Intuitively, the plane spanned by two lines (imagine the case of )
-
intersects both the interior and exterior of the light cone. Although all types of bases are possible, all bases of the following types are of signature
- 2 time
- 1 time, 1 light
- 2 light
-
only intersects the exterior of the light cone
- 2 space
-
is tangent to the light cone, does not intersect the interior of the light cone, and intersects the light cone only along a single light-like line
- 1 light, 1 space
Prop can have signature subspaces. Proof ‘s
Prop time-like is orthogonal only to space-like
let be time-like. Using orthogonal decomposition , let then ==> is space-like
Prop light-like is not orthogonal to
- time-like. because time-like is orthogonal only to space-like
- light-like vectors other than those colinear with itself [metric-cannot-distinguish-colinear-light-like]
Proof
Take an orthogonal decomposition , let be light-like and orthogonal
are space-like. According to the Euclidean inner product inequality
but , so the Euclidean inner product inequality takes equality, thus are colinear .
This implies , thus
Prop The signature of a two-dimensional subspace of cannot be or
Proof Use the previous theorem
Question Is there a proof that does not rely on orthogonal decomposition of time and space? But note, this proposition does not hold for general . In , the following are orthogonal and non-collinear
- 1 time, 1 light
- 2 light
A further concept is “Totally Isotropic Subspace”
Prop When , all signatures are possible for the subspace of
Proof In this case contains the subspace , where it is easy to construct subspaces of all possible signatures
Prop For two non-collinear time-like vectors in , the signature of their span is
Proof Use one of the time-like vectors as the initial basis to generate an orthogonal basis for , but the signature cannot be , so it must be
Prop In let be light-like, be time-like or light-like, and be non-collinear. Then
Proof
are not orthogonal,
Fix a , consider
By adjusting , positive or negative results can be obtained, thus having time-like and space-like, so the signatures are both , it can only be
Another method. The quadratic form corresponds to matrix in basis . Transforming to signature standard form corresponds to matrix transformation
Thus are one positive and one negative, corresponding to signature
[simultaneity-relativity] Relativity of Simultaneity
According to orthogonal basis extension, it can be proved
in , the orthogonal complement of a space-like subspace is a time-like subspace
-
( space-like) <==> (there exists a time-like orthogonal to both )
Proof Note, time-like is only orthogonal to space-like- (==>) Start extension from . The time-like basis vector is orthogonal to the space-like basis vectors
- (<==) Start extension from . All space-like basis vectors form the orthogonal complement space of . are orthogonal to , so belong to , and all subspaces of Euclidean space are Euclidean
Thus the contrapositive also holds
- ( not space-like) <==> (there does not exist a time-like orthogonal to both space-like )
Intuition: Different space-like subspaces may not have compatible time measurement methods or the time-like orthogonal complements of may be different
Take a spacetime orthogonal decomposition of
Prop ==> The sign of the product of time components determines the sign of the inner product
Proof Case analysis for
-
. let . . Similarly for . Then by the Euclidean inner product inequality
Thus , i.e., same sign as
- . let . Set and apply the conclusion from
in Euclidean, we have
Inner product inequality ==> Triangle inequality
in signature quadratic form, this generally does not hold
As mentioned earlier, the quadratic form under the basis corresponds to the matrix . Transforming to the standard quadratic form, the corresponding matrix transformation is
[quadratic-form-inequality-Minkowski] Inner product inequality
one positive and one negative, corresponding to signature
with the same sign, corresponding to or signature
Other signatures or are collinear
[triangel-inequality-Minkowski] signature triangle inequality
- 2 time
,
- ==>
- ==>
- 1 time, 1 light
==>
- ==>
- ==>
Proof of 2 time-like
==>
==>
Note is uncertain
Example let . let be past time-like
The limit or continuity in Euclidean space is directly defined using open balls (to simplify the discussion, only consider the origin as the center)
In Minkowski space or p,q quadratic form space, a direct imitation of the Euclidean case is
- timelike , spacelike , or
- When merging classes, the class is empty
But note that at this time
- The limit meaning represented by is different from the Euclidean case. For example, although two distinct points on the light cone are “separated,” their quadratic distance is zero. For a point on the light cone, although it is separated from , it can be transformed via so that the coordinates of approach arbitrarily. Taking as an example, let . After transformation, , then . under the orbit of the action is the ray
- Taking as an example, should be the analogue of the sphere in . Based on graphical intuition in , some points on appear far from the origin , but in fact the distance of any point on is the same; any two points on can be transformed into each other via an transformation, just like the situation with . On , when the quadratic form distance , it can be considered as the timelike geodesic distance or the proper time of an inertial particle. Timelike points on can be transformed via to have zero spatial coordinates, meaning transforming from uniform motion to rest, where proper time = time. Similar conclusions likely hold for as well.
‘s “continuity of coordinate distance”, i.e., product distance, is finer than ‘s “continuity of quadratic form distance”, because
But this does not implies continuity structure of function
Denote the coordinate distance continuity structure as , and the quadratic form distance continuity structure as
- When the domain continuity structure is the same, continuity of functions with codomain implies continuity of functions with codomain ,
- When the codomain continuity structure is the same, continuity of functions with domain implies continuity of functions with domain ,
- There is no comparison relation between and
may map lightcone to lightcone. It’s said that Zeeman prove that in Minkowski space with spatial dimension larger than , the (bijective map) isomorphism group that preserve any point on lightcone and time order between two point on lightcone is generated by quadratic rotation + translation + scale
Possible clue for the rationality of the quadratic form distance: , via the tensor as a linear map space, inherits a tensor quadratic form. When restricted to , it becomes proportional to the Killing form quadratic form of Killing-form-of-orthogonal-group. Signature , where is the number of boosts, are time-like rotations, and are space-like rotations. Under the Killing form, boosts have positive distance, while time/space rotations both have negative distance.
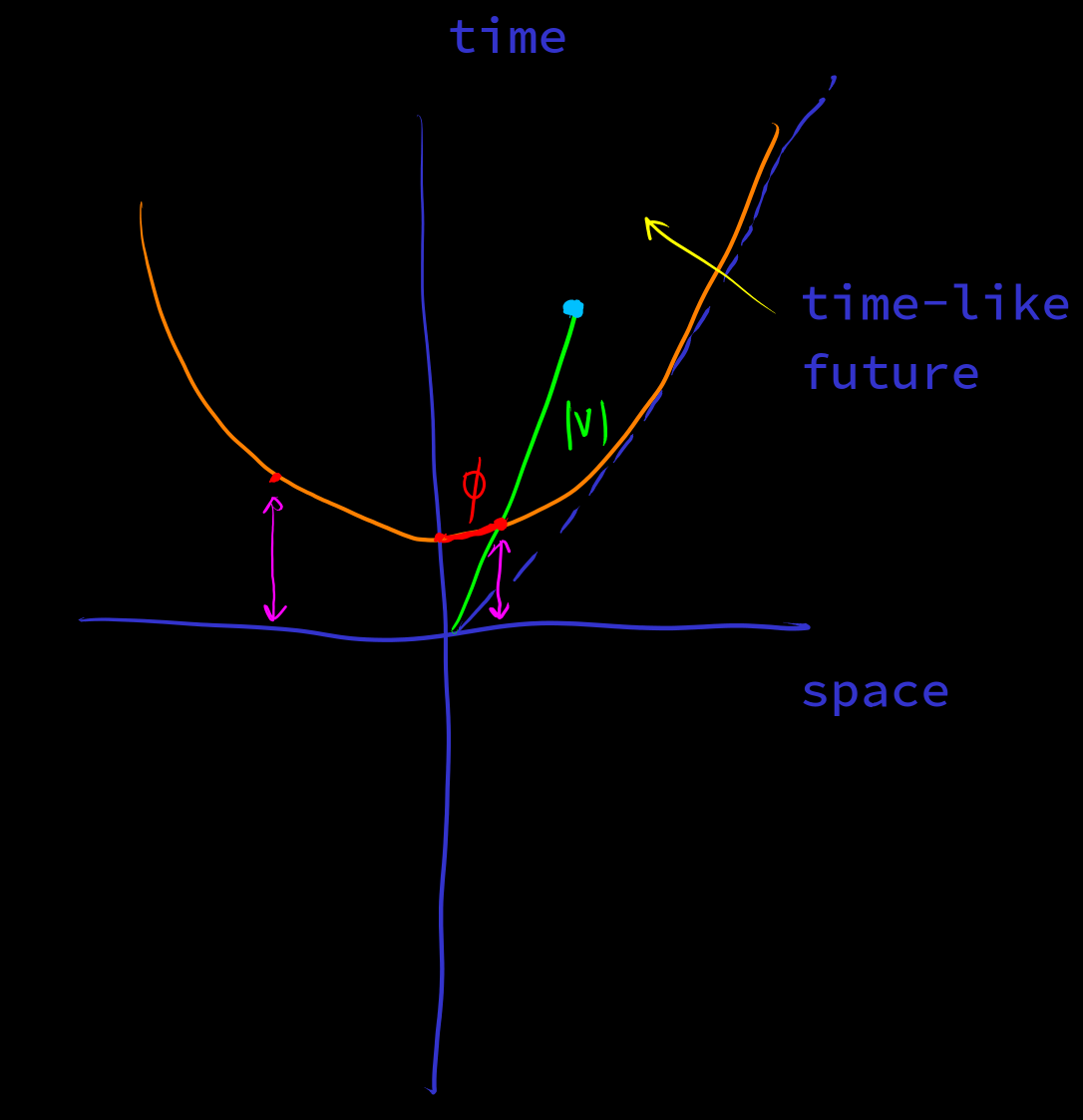
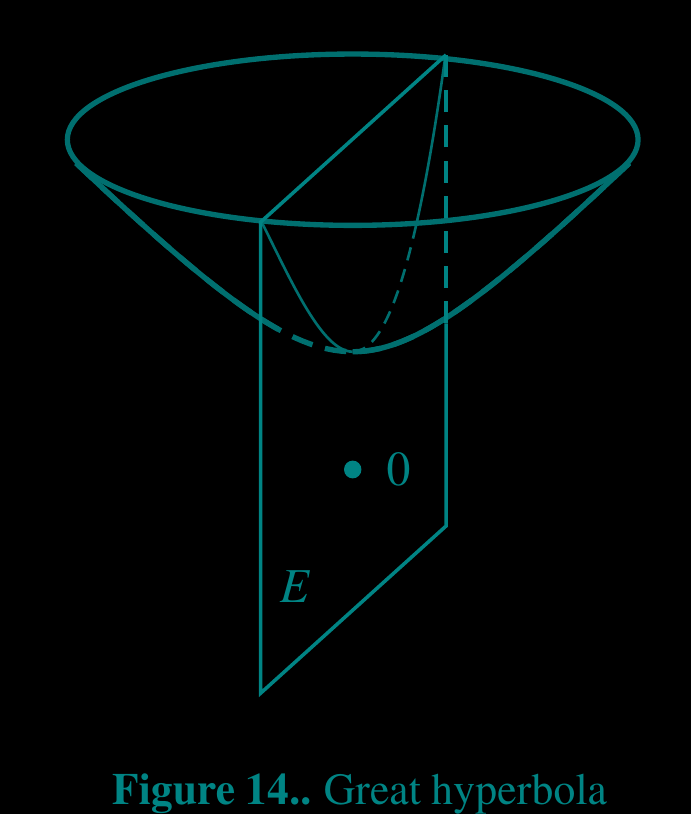
‘s timelike region . It can be decomposed into the radial space part and the directional space part
Similar to polar coordinates in , we can use hyperbolic polar coordinates , where is the quadratic form distance, and is the geodesic length on , also called the hyperbolic angle [hyperbolic-angle] or rapidity [rapidity]
[polor-coordinate-hyperbolic] Hyperbolic polar coordinates
[hyperbolic-cosine-formula] Hyperbolic Cosine Formula
let
let
let future time-like.
Hyperbolic Cosine Formula
[isom-top-hyperbolic-Euclidean]
Limit structure of under the distance geodesic distance Euclidean
Proof
let ,
let
use
use continuity
Generalize to , Euclidean
Proof
use geodesic coordinates
similar to , try to prove
where
- are the geodesic coordinates of
- is the Euclidean distance in geodesic coordinates
Geodesics on quadratic manifolds can be defined using purely quadratic form techniques
The tangent space at point of the quadratic manifold can be defined as the (affine) subspace orthogonal to the radial vector
The initial direction of the geodesic starting from point is in the tangent space of at point ,
The geodesic is defined as
type (p. 19 of ref-9)
type

is a Riemann manifold with constant negative curvature
is a Lorentz manifold with constant positive curvature
alias de Sitter space
The base points (“north and south poles”) of the stereographic projection of the sphere lie on . More than two coordinate charts are needed to cover the entire
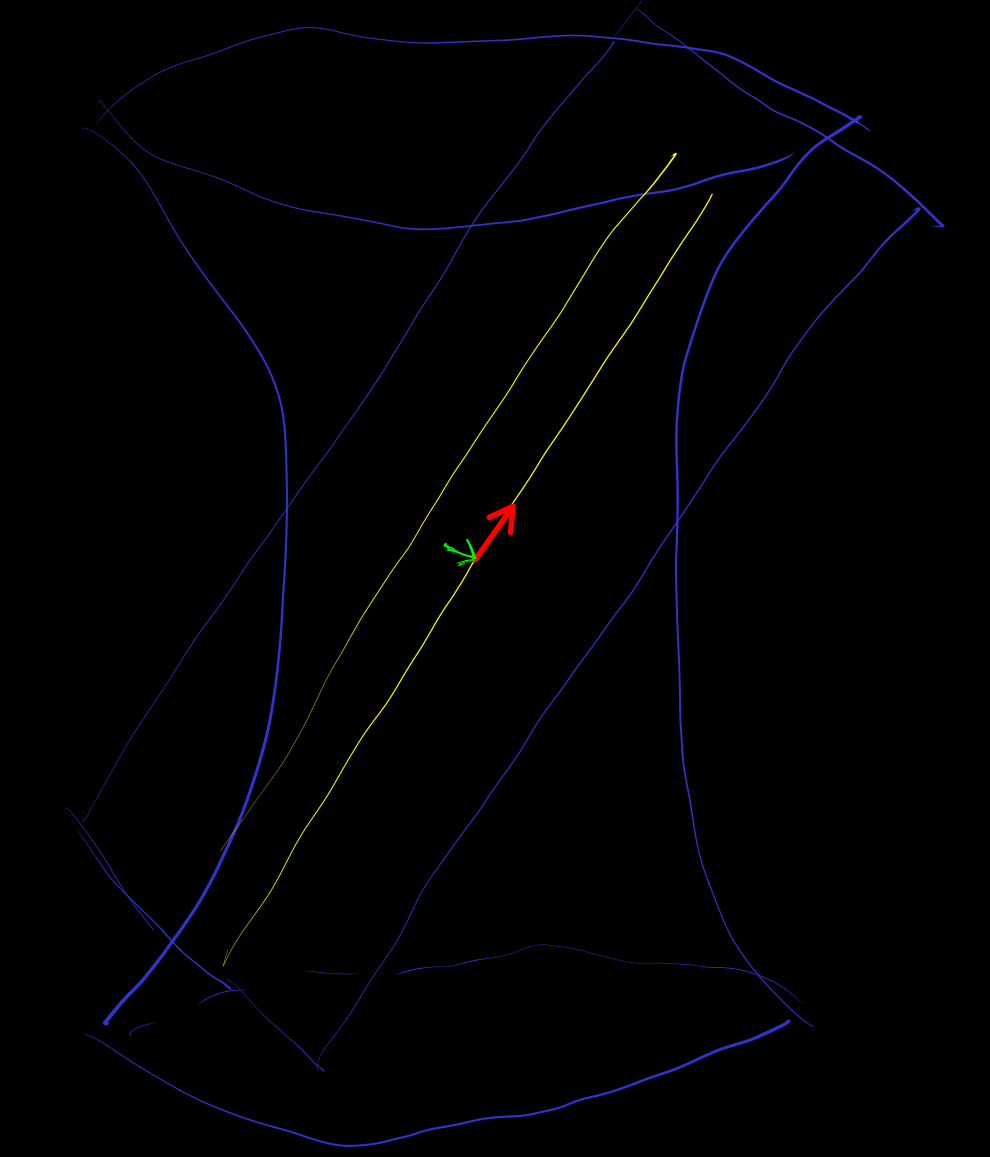
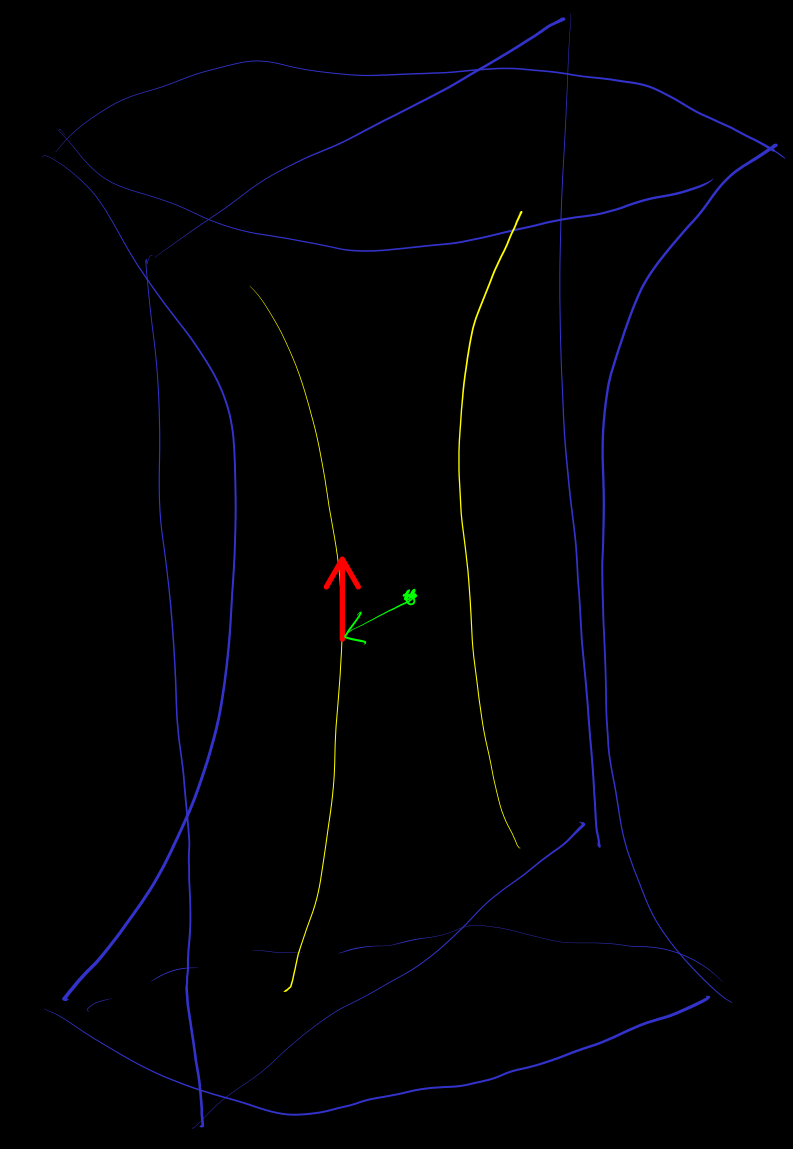
[stereographic-projective-hyperbolic] For the time-like hyperboloid , consider stereographic projection. The two base points lie on the two sheets of the hyperboloid respectively, and the projection forms separated singularities in the light cone direction (the cross shape in the figure below)
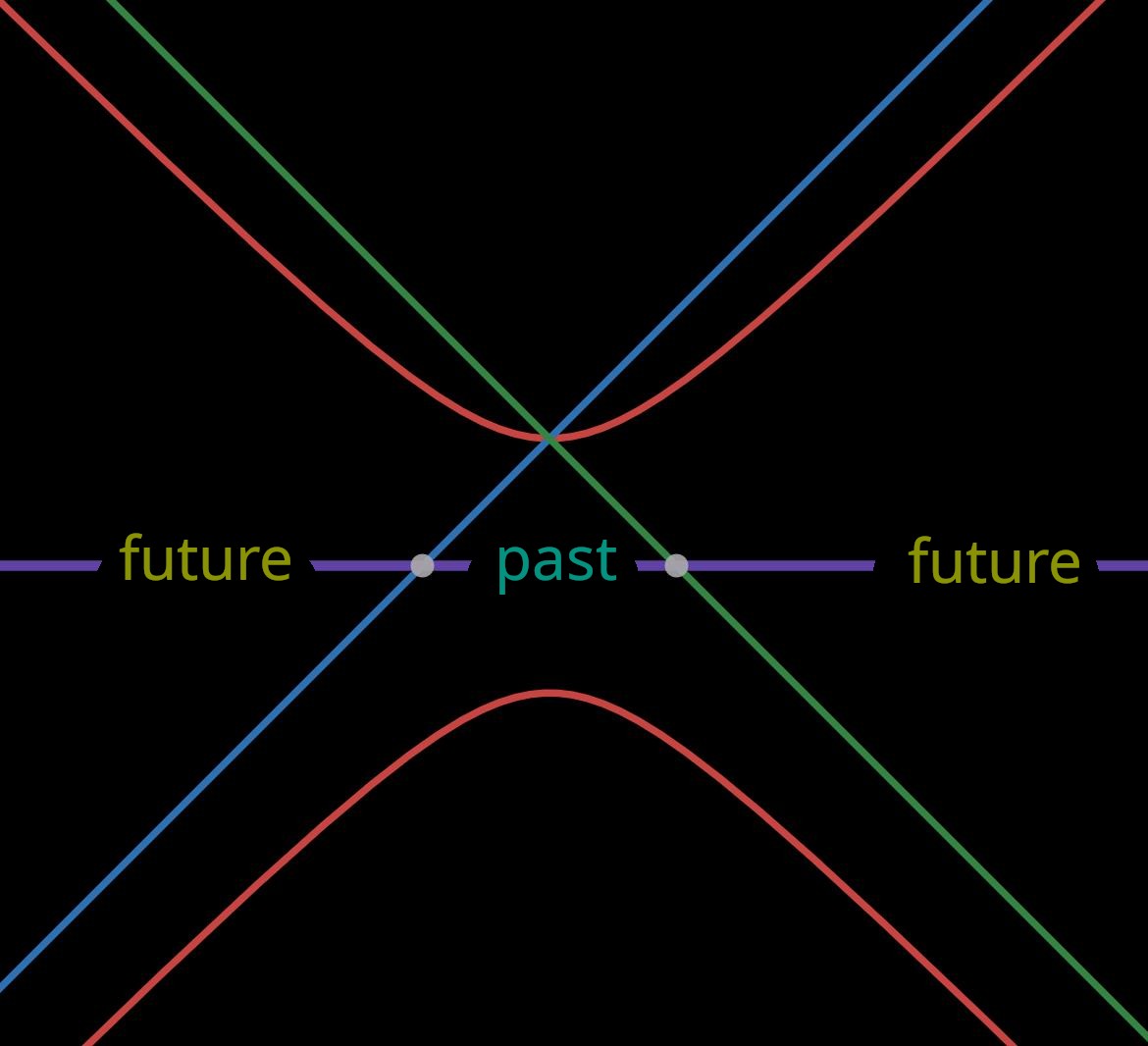
In the projection coordinates of the future base point, the coordinates of the past base point are zero, but the coordinates of the future base point are either absent or are
is special, so the future coordinates in the figure above are disconnected. However, when the spatial dimension is , the future coordinates should be connected
It should be possible to generalizable to quadratic forms. The case of distance is the case of distance for .
space-like hyperboloid, the projective coordinate chart is a Minkowski space of one lower dimension. Perform 3D plotting, draw the light cone of the base point (note that the light cone is “vertical”).
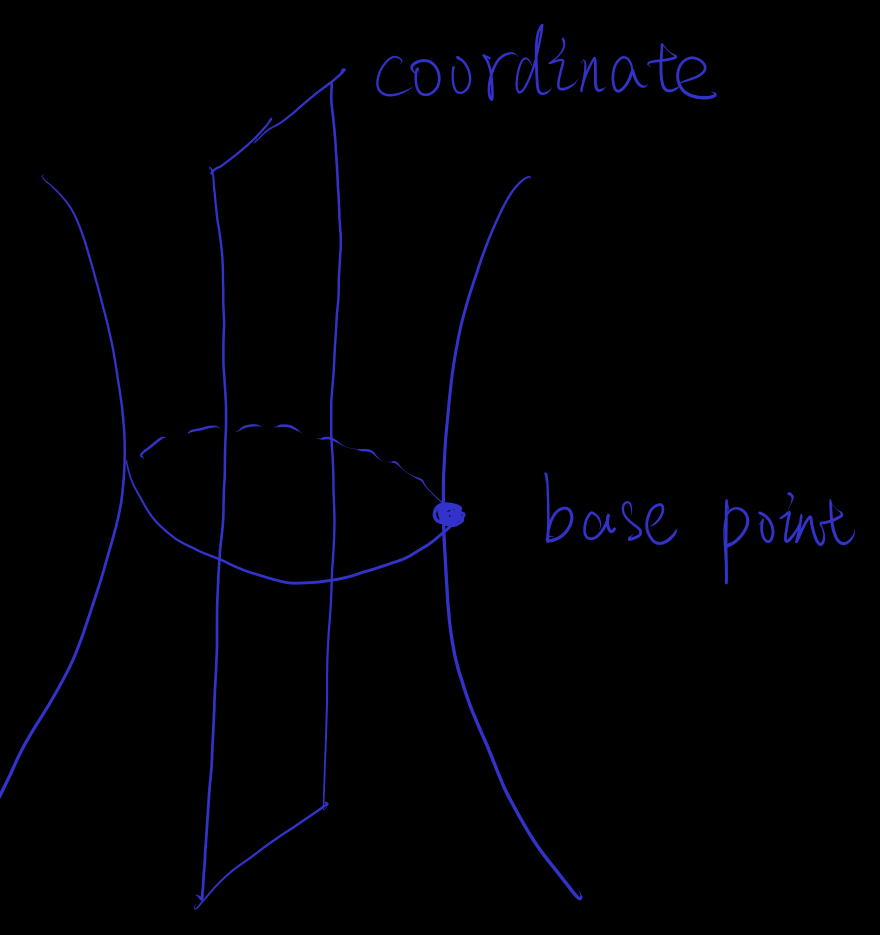
Even if the visual intuition for plotting might be difficult, the analytical calculation should not be hard